
DIY Quadcopter: Flying Control Research Platform
Construction, Identification and Instrumentation of a Low Cost Quadcopter Research Platform. Custom built for the Mechatronics Research Lab at Simón Bolivar University. Controlled via Wifi, using a Raspberry Pi as a gateway.
Hardware design
Most hardware parts were 3D modeled, and printed with a 3D printer.
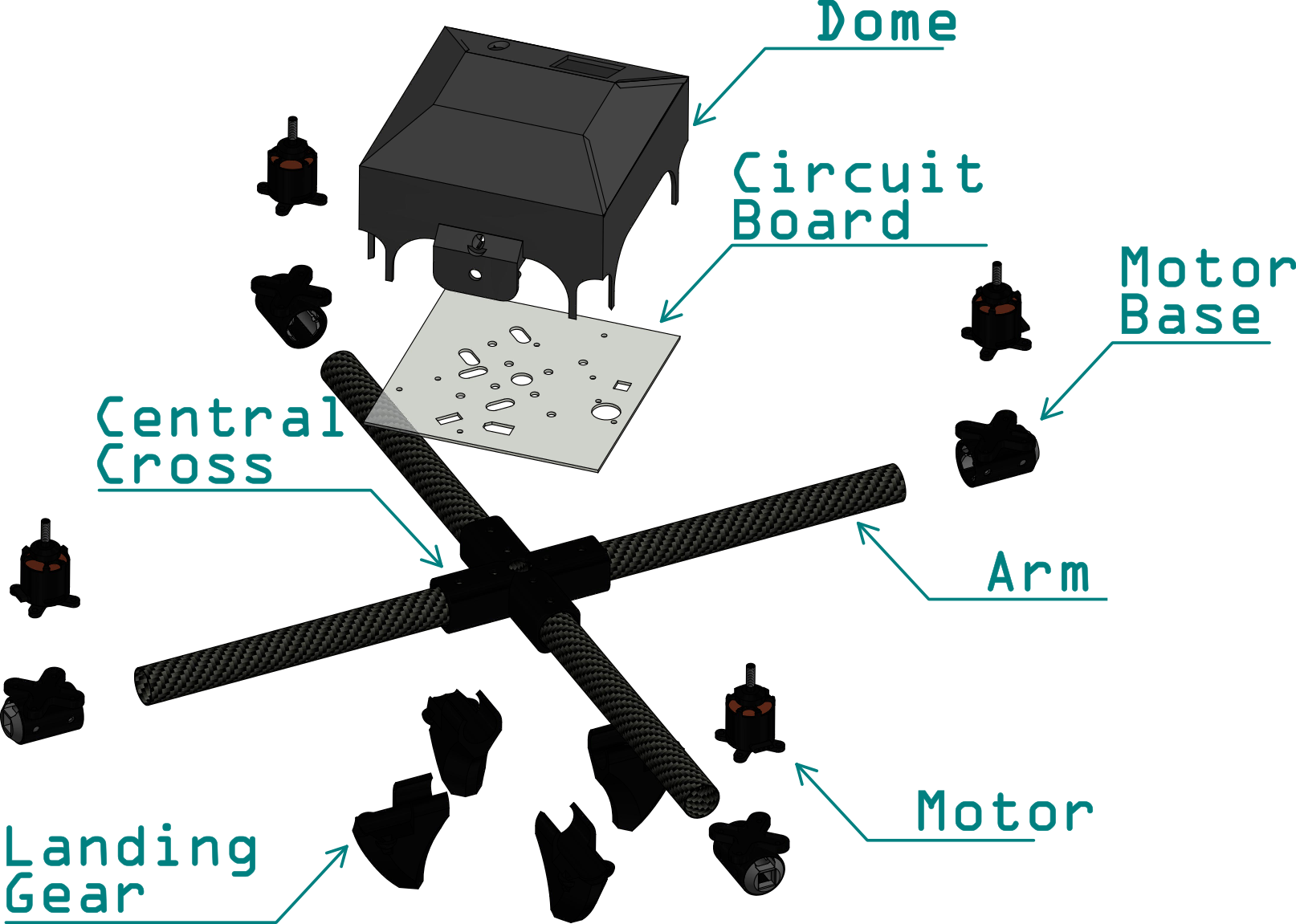
Other bought components were also 3d modeled, to make sure everything fitted together before assembly.
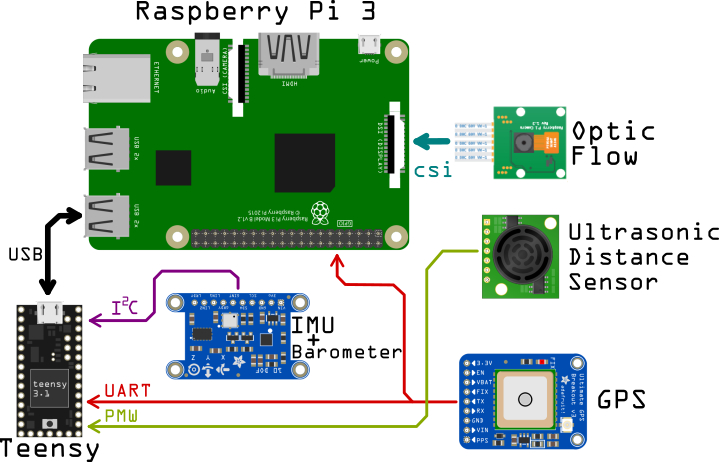
Electronic Design
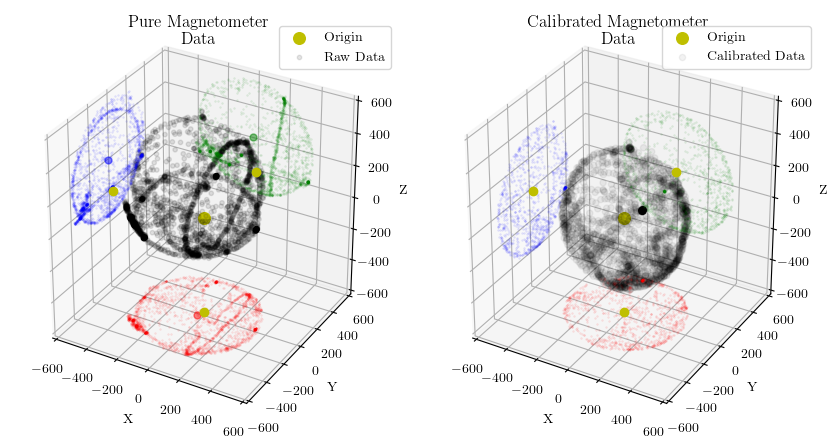
The sensors were selected to provide a wide variety of data, to improve the measurement versatility of the drone.
Which then were tested and calibrated in frmware (the following image is of the calibration of the magnetometer).
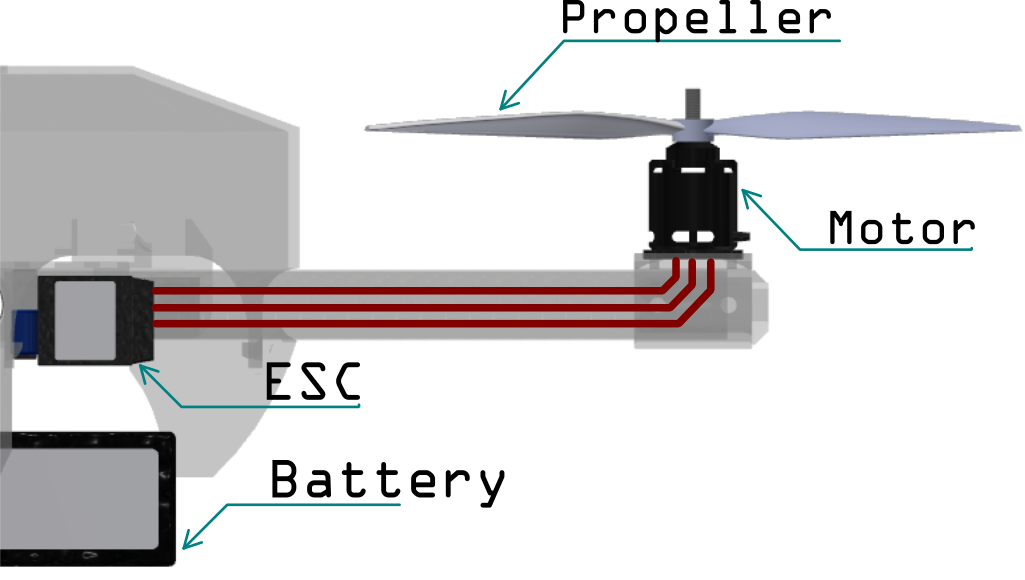
Assembly
Most of the components were 3D printed and assembled together with plastic screws.

Posted In:
Drones